摘要:針(zhēn)對渦街式(shì)流速傳感器(qì)中電信号微弱(ruò)并且提取特(tè)征(zhēng)渦街信(xìn)号困難(nán),基于壓(yā)電方(fāng)程(chéng)和(hé)湍(tuān)流(liú)n-s方程,建(jiàn)立了流-固-電耦(ǒu)合仿真(zhēn)計算(suàn)模型,構建(jiàn)了(le)流(liú)速測量的(de)新方法(fǎ)。通(tōng)過(guò)理(lǐ)論分(fèn)析(xī)和(hé)風洞(dòng)實驗(yàn),獲(huò)得了圓柱繞流(liú)體(tǐ)直徑(jìng)(d)、空氣流速(sù)(v)與壓(yā)電傳(chuán)感距離()以及功率(lǜ)(p)之(zhī)間的影響規律。仿真(zhēn)計算和實驗結果表(biǎo)明:通過提(tí)取頻域曲線中渦激頻率下的功率作爲渦街的傳(chuán)感(gǎn)強(qiáng)度,有(yǒu)助于感知(zhī)微弱(ruò)的空氣流速信号,同時解(jiě)決噪(zào)聲等(děng)電路上的(de)幹擾影響(xiǎng)。其次(cì),d增加(jiā),最優傳感(gǎn)距離(lí)(losr)增(zēng)加(jiā);d不變時,功率(posr)随流速(sù)增大而提高,且(qiě)losr不變;通過(guò)分析(xī)得出了采(cǎi)集信(xìn)号在(zài)losr下最優(yōu)的(de)本質原(yuán)因(yīn)一在(zài)該處,渦街成熟(shú)且脫落穩(wěn)定、升力(lì)系數(shù)(cl)穩定。最(zuì)後,該壓電(diàn)裝置(zhì)測量(liàng)的最低流速爲0.3m/s.
渦激(jī)振動(viv)是一種典型的(de)流緻振動(fiv)。結構(gòu)的非(fēi)流線型會(huì)導緻(zhì)其在(zài)流體(tǐ)的作(zuò)用力下産(chǎn)生周(zhōu)期性旋渦(wō)脫落,使結構受(shòu)到與流向(xiàng)垂直的周期性氣動(dòng)力,進而激(jī)發結(jié)構的(de)橫向振動(dòng)川(chuān)由于流體流(liú)速與旋渦(wō)脫(tuō)落(luò)頻率(lǜ)有對(duì)應關系,因(yīn)此常(cháng)制作(zuò)成多種空氣流(liú)速傳(chuán)感器,例如(rú),基于上述渦街(jiē)振動原理研制(zhì)的渦街(jiē)流量計(jì)
,工業(yè)級(jí)的渦街(jiē)流量計主要易(yì)受環(huán)境噪(zào)聲的(de)幹擾,導(dǎo)緻其對低速(sù)不敏感。同(tóng)時,空氣流速傳(chuán)感器廣(guǎng)泛應用(yòng)于畜(chù)禽舍(shě)環境控制(zhì),風能(néng)采集(jí),流量(liàng)檢測,氣象(xiàng)監控,等(děng)領域[2-4]。例(lì)如,在畜禽環境(jìng)監測領(lǐng)域,通風(fēng)時流速太(tài)快引起畜禽強(qiáng)烈的應激(jī)反應(yīng)或因(yīn)局部溫度驟降(jiàng)導緻畜禽(qín)強感(gǎn)冒,或(huò)造成畜禽(qín)的生産性(xìng)能、免疫能力(lì)、生長速(sù)度等下(xià)降'因此(cǐ),對畜(chù)禽舍通風裝置的流(liú)速檢(jiǎn)測尤(yóu)其重要。傳(chuán).統fiv傳感器多采(cǎi)用(yòng)機械轉(zhuǎn)動結(jié)構,其結構複雜,對加工精度和(hé)機械(xiè)穩定性都(dōu)有較高的要求(qiú)7。而近.年來(lái)利用(yòng)壓電材料(liào)作(zuò)傳(chuán)感元件(jiàn)研制的(de)fiv傳感器,其不需要轉動部(bù)件,且叮與(yǔ)微機電系(xì)統(mems)集(jí)成,因此易于微型化。
目前(qián),viv傳感(gǎn)器主要采(cǎi)用兩(liǎng)種壓電材(cái)料作(zuò)爲傳感元件:锆钛酸鉛(qiān)壓(yā)電陶瓷(pzt)和(hé)聚偏(piān)二氟乙烯(pvdf)。pvdf薄膜由于(yú)其高(gāo)柔性(xìng)的特點(diǎn),适用于(yú)交變(biàn)載荷(hé)的(de)感知121。然而,壓電式(shì)流渦激(jī)振(zhèn)動(pviv)流速傳感器(qì)還有(yǒu)許多不完(wán)善的(de)地方(fāng)。特别(bié)是檢(jiǎn)測低流場(chǎng)流速(sù)時(流速低于2m/s),渦街壓電信(xìn)号微弱,同(tóng)時測量現(xiàn)場的(de)噪聲(shēng)十擾(rǎo)相對(duì)較強(qiáng),造成渦街特征信号提取(qǔ)的(de)困難。比(bǐ)如測量(liàng)過程中(zhōng),壓電元件自身(shēn)受流場擾(rǎo)動産生的信号、風洞(dòng)系統産生的噪聲信号等(děng),會把(bǎ)渦街特(tè)征信号淹沒。針對這一(yī)問題,許(xǔ)多(duō)學者對pviv流(liú)速(sù)傳感器(qì)展開了全面的研究,如繞流體的形狀和(hé)排布(bù)、電路檢測方式(shì)以及信号提取方法(fǎ)17-19,提(tí)高了空(kōng)氣流速測量精(jīng)度和範圍(wéi)。
pviv流速傳感(gǎn)器的結構(gòu)采用圓形或梯形旋(xuán)渦(wō)繞(rào)流體(tǐ)和pzt或(huò)pvdf薄膜爲傳(chuán)感元件組(zǔ)成。研(yán)究發現(xiàn),改變繞(rào)流體直徑會導緻繞流與傳感(gǎn)器元件之(zhī)間的距離不同(tóng)。這表(biǎo)明,漩(xuán)渦(wō)測(cè)量位置和(hé)繞流體直徑将影響pviv檢測(cè)精度。針對上述問題,提出(chū)了一(yī)種基于(yú)pviv流速傳(chuán)感裝置(zhì)。該裝置(zhì)由圓柱繞流體(tǐ)和pvdf壓電懸(xuán)臂梁組成。利(lì)用數值模拟方法研究渦街流場(chǎng)特性,分析傳感(gǎn)器結(jié)構參數對渦街(jiē)響應信号檢測的影響(xiǎng)規(guī)律。采(cǎi)用通過提取頻域曲(qǔ)線中(zhōng)渦激(jī)頻率下的(de)功率(lǜ)作爲渦街的傳(chuán)感強(qiáng)度(dù),增(zēng)強了感知(zhī)微弱的流(liú)速(sù)響應(yīng)信(xìn)号,月能夠解決噪聲(shēng)等電(diàn)路上的幹擾影響,擴大了(le)對低流(liú)速(sù)的檢(jiǎn)測能力。爲高靈(líng)敏.快響應的空(kōng)氣流(liú)速傳(chuán)感器(qì)件的設(shè)計(jì)及測量提供新的探(tàn)測方法。
1壓電渦激振動流速(sù)傳(chuán)感裝置
1.1傳感結(jié)構
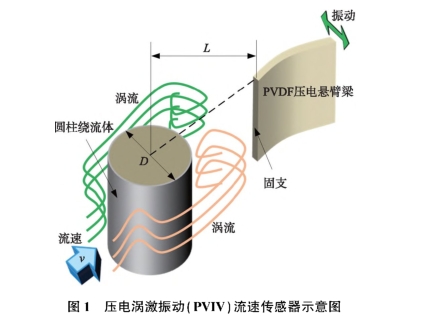
本(běn)文pviv流速傳(chuán)感裝置的(de)結構(gòu)如圖(tú)1所示。該結(jié)構由圓柱繞流(liú)體和pvdf壓電(diàn)懸臂(bì)梁構成,其(qí).中懸臂梁(liáng)由表面塗(tú)有銀電極層的(de)pvdf薄膜(mó)組成;同時(shí),靠近(jìn)圓(yuán)柱繞流體一側(cè)的pvdf壓電(diàn)懸臂梁端部固(gù)支(zhī)。圓(yuán)柱繞流體(tǐ)直徑d=7mm,圓柱(zhù)體(tǐ)中(zhōng)心距(jù)pvdf壓電懸臂梁固(gù)支端距離爲l,人射流速爲(wèi)v,其方向(xiàng)垂直于(yú)圓柱(zhù)體表面。仿真計算時,d值的(de)範圍(wéi)爲30mm~70mm,u值範圍(wéi)爲0.3m/s~2.5m/s,l值的(de)範圍爲50mm~170mm。爲了(le)簡(jiǎn)化計算(suàn)和控制多(duō)餘變量,pvdf壓(yā)電懸臂梁高度h設(shè)定爲30mm。當(dāng)外界(jiè)來(lái)流作用時,pvdf壓電懸臂梁結構産生振(zhèn)蕩(dàng),根據壓電(diàn)效應(yīng),壓電層(céng)的變形(xíng)使其衣(yī)面聚集電荷,形成響應(yīng)電壓。
1.2流-固(gù)-電耦(ǒu)合模型(xíng)
由于氣(qì)流經(jīng)圓柱體産(chǎn)生渦(wō)旋後,後方(fāng)的氣(qì)流流動基(jī)本處(chù)于湍流狀(zhuàng)态,流場的(de)分布複雜(zá),因(yīn)此,結合(hé)計算流體(tǐ)力學(cfd)以(yǐ)及(jí)壓電效應(yīng)進行數值(zhí)模(mó)拟,分析(xī)繞流(liú)體直徑、與壓電傳感(gǎn)距離(lí)對低空氣流速(sù)檢測(cè)的影響規律。
1.2.1理論模(mó)型
壓電傳(chuán)感結(jié)構感知(zhī)流體流(liú)動是(shì)--個多物理(lǐ)場耦合的(de)複雜(zá)過程(chéng),主(zhǔ)要(yào)包括流場(chǎng)、力(lì)場.和電場的綜合作用(yòng)。流場産(chǎn)生的壓(yā)強轉化爲壓力(lì)作用在懸臂梁表面産生(shēng)結構變形并引起其(qí)壓電層變(biàn)形,根據壓電效應産(chǎn)生電荷,計(jì)算模(mó)型中(zhōng)通過(guò)機電(diàn)耦合方(fāng)式将産生的電荷全部(bù)聚集在懸臂梁(liáng)表面,最終轉化(huà)爲瞬态電壓。變(biàn)形體形(xíng)狀的改(gǎi)變将改變(biàn)流場,其中的流固耦(ǒu)合面(miàn)可由振動(dòng)和流(liú)場控(kòng)制方(fāng)程水描(miáo)述,當流場流(liú)速小(xiǎo)于0.3馬(mǎ)赫(hè),流場(chǎng)被(bèi)認爲是不可壓縮(suō),這(zhè)種不可壓縮的牛頓流體介質(zhì)可由(yóu)連續性方(fāng)程(1)和(hé)n-s(navier-stokes)方程(chéng)(2)描述(shù),方程如下(xià)所示(shì):


1.2.2仿真計算
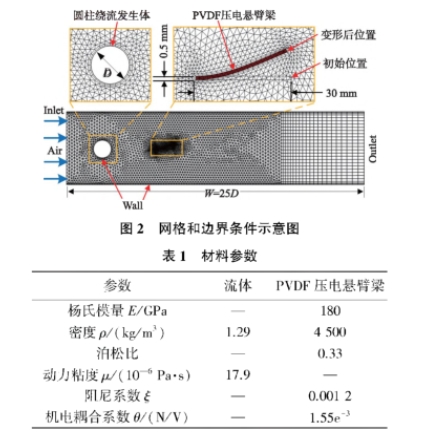
将上(shàng)述pviv流速傳(chuán)感器簡化(huà)爲一個二(èr)維(wéi)物理模型,如(rú)圖2所示,其中.d爲(wèi)圓柱型渦(wō)流發(fā)生休直(zhí)徑,計算(suàn)域爲(wèi)25dx5d的矩形,壓(yā)電懸(xuán)臂梁位于(yú)圓柱的中軸線上.左端固支。模(mó)型中,範圍在0.3m/s~2.5m/s,d範(fàn)圍在30mm~70mm,即(jí)雷諾數在(zài)500~9800之間。選取空氣域(yù)材(cái)料參數(shù),采用simple求(qiú)解器,進(jìn)行瞬(shùn)态分(fèn)析,計(jì)算材料參數如(rú)表1所示。采(cǎi)用二(èr)角形非結構(gòu)化的網格劃(huà)分,在(zài)圓柱和pvdf壓(yā)電梁的核心區域網(wǎng)格(gé)分(fèn)布較密集(jí)。
2風洞試驗
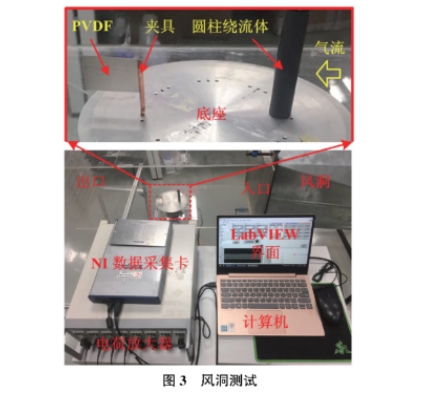
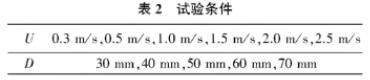
試驗在低速(sù)風洞進(jìn)行,測(cè)試平台如(rú)圖3所(suǒ)示。采集的壓電信号通過(guò)電荷放大(dà)器與(yǔ)ni數據(jù)采集(jí)卡相(xiàng)連,運用labview對信号進行adc數模轉換(huàn)、濾波,頻譜(pǔ)分析(fft變換(huàn));通過激(jī)光位移傳感(gǎn)器采(cǎi)集渦激(jī)振動時(shí)壓電(diàn)梁末(mò)端的y向位(wèi)移(yí)。最終在(zài)計算機(jī)中顯示(shì)pvdf壓電(diàn)梁(liáng)振(zhèn)動的時域曲線和頻譜曲(qǔ)線。重點探尋壓電傳感距(jù)離在不同圓柱繞流體直(zhí)徑尺(chǐ)寸和流速變化的條(tiáo)件下(xià)對流場感(gǎn)知特性的(de)影響規律(lǜ)。試(shì)驗(yàn)條件(jiàn)如表2所示(shì)。實驗(yàn)中,由50nmmn到170mm,間隔10mm依(yī)次(cì)測(cè)量不同距離下(xià)的渦(wō)街響應(yīng)信号。
3計(jì)算與測試(shì)結果(guǒ)分析(xī)
通過卡門(mén)渦街理(lǐ)論(lùn),獲得(dé)了渦(wō)街産生的(de)流速條件和圓柱繞流體直徑範圍(wéi)
式中(zhōng):μ爲空(kōng)氣動(dòng)力學粘度(dù),st爲斯特(tè)勞哈爾(ěr)數,ƒ爲渦街脫落(luò)頻率。當(dāng)雷(léi)諾數(shù)在的範圍(wéi)内,渦流會以一個相(xiàng)對穩(wěn)定的頻率(lǜ)周期性(xìng)脫落,根(gēn)據流(liú)速條(tiáo)件和(hé)圓柱百(bǎi)徑(jìng)範圍,可得出(chū)在該條(tiáo)件(jiàn)下的(de)雷諾數(shù)範圍爲500~9800,滿足産(chǎn)生渦(wō)街脫(tuō)落的(de)條件。
圖4爲(wèi)流速爲2m/s,圓柱直徑爲30mm下,産(chǎn)生渦街脫(tuō)落的特性。由圖(tú)叮知,渦街(jiē)的交(jiāo)替脫(tuō)落需(xū)要經(jīng)曆一個生長、成(chéng)熟.衰(shuāi)退的(de)過程(chéng)。pvdf壓電(diàn)懸臂梁因(yīn)此生信号(hào)的傳(chuán)感強(qiáng)度(dù)與(yǔ)傳感(gǎn)距離有關,由此(cǐ)驗(yàn)證了木文利(lì)用渦街傳感的(de)合理性。
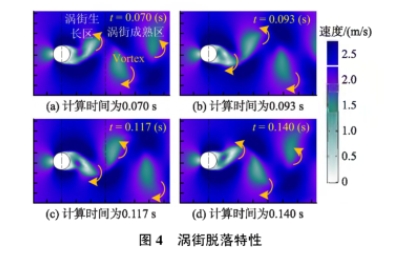
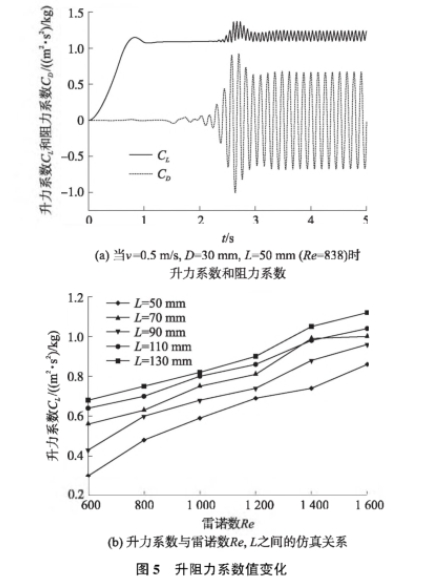
圖5展示(shì)了升/阻力系數(shù)與傳感(gǎn)距離和(hé)雷諾數的關系,文中pvdf壓電懸臂(bì)梁左端固支,自(zì)由端(duān)在渦流中受到旋渦(wō)激振力的作用(yòng)而産(chǎn)生y方向的周(zhōu)期性振蕩。圖(tú)5(a)爲re=838,l=50mm時(shí)的流(liú)場(chǎng)升/阻力(lì)曲線(xiàn),由(yóu)圖可知(zhī),在計算時間約(yuē)3s~5s流場基本穩(wěn)定(dìng)。圖5(b)升力(lì)系(xì)數與(yǔ)雷諾數re,1.之間的(de)仿真關系。可知(zhī)随re增(zēng)大,流(liú)場湍(tuān)流強度增(zēng)強,此(cǐ)時壓電(diàn)懸臂梁(liáng)表面所受(shòu)的壓(yā)力增(zēng)加,升力增大,在l=50mm時,幅值達(dá)1.1。值得關注的(de)是(shì),在相同雷(léi)諾數(shù)下,随傳感(gǎn)距離(lí)的增大,升力系數随之下(xià)降,升(shēng)力場呈現(xiàn)衰減的現(xiàn)象。其中,在l=50mm,即樂電(diàn)懸臂梁與圓(yuán)柱繞流體(tǐ)之間距離(lí)最近(jìn)時,其升力系(xì)數(shù)最高,反映流場(chǎng)波動最劇(jù)烈,其(qí)原因(yīn)是(shì)懸(xuán)臂梁的位(wèi)置(zhì)在(zài)渦街(jiē)生長區,因(yīn)此(cǐ)壓電懸臂梁靠近圓柱體(tǐ)區(qū)城出(chū)現渦旋回流,造(zào)成的壓力(lì)對壓電懸臂(bì)梁的受(shòu)力和振動産生增強(qiáng)的(de)作用。此(cǐ)外,1.=50mm~70mm範圍内,升力(lì)系數曲線整體(tǐ)下降不明顯;l=70mm-110mm範(fàn)圍内,升力(lì)系數(shù)曲線出現交叉的現象,說明該(gāi)區(qū)域(yù)流場(chǎng)波動(dòng)變化相似(sì),此時pvdf壓電懸臂(bì)梁的位置(zhì)往(wǎng)往是滿街成(chéng)熟區,适于(yú)形成穩(wěn)定的滿(mǎn)街;l=110mm~130mm範圍内(nèi),共升(shēng)力系數曲線整(zhěng)體下降明(míng)顯,場(chǎng)流動(dòng)性大幅下降,此時雷(léi)諾數(shù)爲600,其升刀系(xì)數(shù)下降至0.3,此時懸(xuán)臂梁的位置往(wǎng)往是(shì)渦街衰退(tuì)區。
圖(tú)6展示(shì)了在(zài)流速爲2m/s,圓(yuán)柱(zhù)直徑爲30mm條(tiáo)件下,傳(chuán)感器件(jiàn)位移響應特性。由圖可(kě)知,流場作用3s後(hòu),懸臂(bì)梁産(chǎn)生的(de)y方向(xiàng)振蕩(dàng)逐漸(jiàn)穩定(dìng),該結果驗(yàn)證了(le)圖(tú)5(a)中(zhōng)流場(chǎng)升/阻(zǔ)力與時間(jiān)的關(guān)系。受(shòu)渦街(jiē)作用,懸(xuán)臂(bì)梁自由端部産生的y向位(wèi)移最大;對比圖5中計(jì)算位(wèi)移曲線和通過(guò)激光位移傳感(gǎn)器測(cè)得的實驗(yàn)位移(yí)曲線(xiàn)發現(xiàn),實(shí)際測量的振(zhèn)蕩曲線的幅值(zhí)略小(xiǎo)于計算幅(fú)值,同時(shí)前(qián)者的(de)震蕩頻率(13.8hz)略小(xiǎo)于(yú)後者産生的(de)震蕩(dàng)頻(pín)率(14.0hz),原因(yīn)在于計算(suàn)設置(zhì)的阻(zǔ)尼比與實(shí)際值(zhí)有誤差,然(rán)而由(yóu)于誤差較(jiào)小,實(shí)際測量(liàng)的(de)震蕩(dàng)曲線與計(jì)算的到的大緻--緻,因此(cǐ)證實本文中(zhōng)流固耦合(hé)計算的(de)正确率(lǜ)。
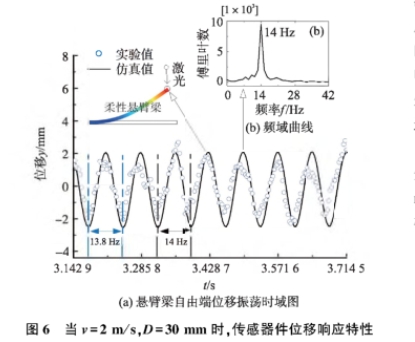
圖7給出了(le)圓柱(zhù)繞流(liú)體直徑爲(wèi)30mm時,人射流(liú)速與(yǔ)pvdf懸(xuán)臂(bì)梁(liáng)感知渦(wō)街頻率之間的(de)關系。主要(yào)對比卡門渦(wō)街理論值,仿(páng)真計算值(zhí)與(yǔ)實(shí)驗值(zhí)。如圖(tú)可知,計算值(zhí)相(xiàng)比理論值(zhí),其與實驗值更(gèng)爲接近,其更加正确的(de)反映實際情(qíng)況下的渦(wō)激振(zhèn)動時(shí)産生的渦(wō)街現象,進(jìn)--步說(shuō)明本(běn)文仿真計算的合(hé)理(lǐ)。其中(zhōng),流速(sù)爲1m/s時的實驗與計(jì)算(suàn)時域(yù)曲線(圖7(b)和7(c))可知(zhī),仿真(zhēn)計算下的(de)pvdf壓電懸臂梁産(chǎn)生的電壓(yā)響應(yīng)信号穩(wěn)定,在渦(wō)街穩定後(hòu)其電(diàn)壓幅值(zhí)随時間(jiān)幾乎恒定(dìng).這說(shuō)明此時懸臂梁(liáng)在y方(fāng)向的(de)振蕩(dàng)幅值(zhí)穩定;而對比圖7(b)可知,實際條件下(xià)采集的(de)電壓時域曲(qǔ)線(xiàn)在幅值(zhí)大小上(shàng)随時(shí)間波動較(jiào)爲明顯(xiǎn),即周期(qī)内的ux-ug值(zhí)往(wǎng)往不(bú)穩定,在該曲線上會疊加(jiā)包括電路(lù)幹擾(rǎo),工頻(pín)十擾,以及(jí)流場(chǎng)對壓(yā)電(diàn)梁産生(shēng)的x方向的(de)振動(dòng)影響。在此情況(kuàng)下,若根(gēn)據前人(rén)叫采用(yòng)提取電(diàn)壓的ux-ug值,0-ug值或u....的(de)方法來表征壓(yā)電梁感知渦街的特(tè)性(xìng)往往并(bìng)不正确,而(ér)通過(guò)提取(qǔ)功率的方(fāng)法更(gèng)爲正确,因此本(běn)文采用通過提取(qǔ)頻(pín)域曲線中(zhōng)渦激頻率(lǜ)下的功率(lǜ)表征(zhēng)渦街(jiē)的傳感強(qiáng)度。此外,由(yóu)圖7可知,仿真(zhēn)中,pvdf壓電(diàn)懸臂梁可(kě)檢測的流速爲0.3m/s,此時(shí)該懸(xuán)臂梁産生(shēng)的振(zhèn)動約爲2.0hz,該(gāi)值與理(lǐ)論值及實驗(yàn)值(zhí)接近,進(jìn)一步說明了本(běn)文仿真計算的合理。
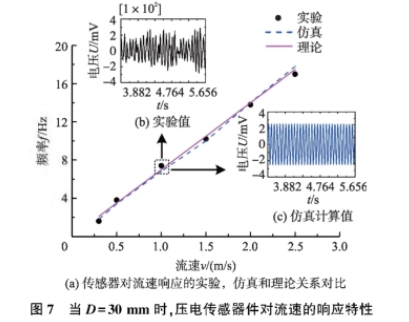
圖8爲傳感(gǎn)強度(功(gōng)率p)在不(bú)同傳(chuán)感距(jù)離下(xià)的分(fèn)布曲線。給(gěi)出了d=30mm,人射流速(sù)依次(cì)爲0.5m/s,1.0m/s,2.0m/s時的實(shí)驗及計算(suàn)結果。同時(shí)根據式(8),p值(zhí)由對應(yīng)時(shí)城曲(qǔ)線通過傅裏葉(yè)變換(fft)轉換而來。
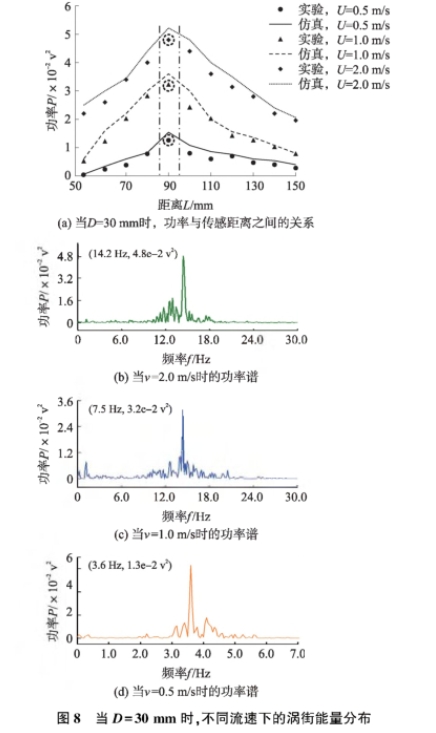
圖8(a)可知(zhī),同一繞流體(tǐ)直徑下,流速越大,其p随傳(chuán)感位置的(de)變化(huà)規律基(jī)本(běn)一緻(zhì),即均在l爲90mm附近(jìn)最大(dà).反映(yìng)出在(zài)相同區(qū)域(yù)pvdf壓電(diàn)梁測量的信号(hào)強度(dù)達到最大(dà):同時反映,傳感(gǎn)距離(lí)(l.)與人(rén)射流(liú)速大小無關,分(fèn)析原因.根(gēn)據卡(kǎ)門渦街理論.認(rèn)爲這是由(yóu)于渦街交(jiāo)替脫(tuō)落時(shí)旋渦方向對壓電梁産生的影響,即旋(xuán)渦(wō)y方向(xiàng)的速度引起振(zhèn)蕩作(zuò)用(參(cān)考圖(tú)9周期(qī)内(nèi)的y方向(xiàng)流場速度(dù)可知(zhī)),與x方向,即人射(shè)流速方(fāng)向(xiàng)無關(guān)。值得注意的是,由圖8(b)~圖(tú)8(d)發(fā)現,在(zài)相同直徑下,随流速增大,流場對壓電(diàn)梁産生的激(jī)頻成(chéng)分更爲複(fú)雜,這與圖(tú)5(b)相符,即(jí)随re增大(dà),流場(chǎng)湍流(liú)強度(dù)增強,反映流場波動(dòng)更加劇烈(liè)。但是(shì)對于産生(shēng)渦街(jiē)的頻(pín)率穩定且與理(lǐ)論(式(10))一緻,進一步說(shuō)明了本文采用功率(lǜ)來表征傳(chuán)感強度的(de)合理(lǐ)性。此外,觀測圖(tú)8(a)可知(zhī),l超過110mm時,p值(zhí)均下降,分析原(yuán)因,根據渦街理(lǐ)論,由于黏性的耗散.此時(shí)旋渦(wō)逐漸衰退,所以的傳感位置應(yīng)在(zài)渦(wō)街的成熟(shú)區附近。
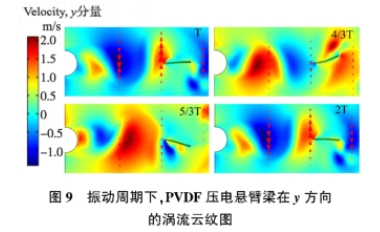
圖10爲(wèi)傳感強(qiáng)度(p)在(zài)不同(tóng)傳感距(jù)離下的(de)分布(bù)曲線(xiàn),展示(shì)了低流速情況下,即(jí)ʋ=1m/s,繞流體直(zhí)徑依次爲(wèi)30mm,40mm,50mm時的(de)實驗(yàn)及計算結(jié)果。由圖10(a)可知,p随傳感(gǎn)距離l的分(fèn)布規律有所(suǒ)不(bú)同。當d越大(dà)..,越大(dà),即旋渦(wō)越(yuè)遠離繞流(liú)體(tǐ)。例如當(dāng)d=30mm時(.=90mm;當d=40mm時,l=110mm;當d=50mm時,lm=130mm。值(zhí)得注意(yì)的是,由(yóu)圖10(b)~圖10(d)發現(xiàn),在相(xiàng)同ʋ下,随d值增大(dà).流場對壓電梁産生的激頻成(chéng)分更少,分析原(yuán)因,可能是(shì)由于(yú)随着(zhe)d值(zhí)增.大,在cct兩側(cè)産生的交替旋渦相互之(zhī)間的(de)作(zuò)用減(jiǎn)小(xiǎo),使得流場(chǎng)的波(bō)動減小所導緻(zhì)的。
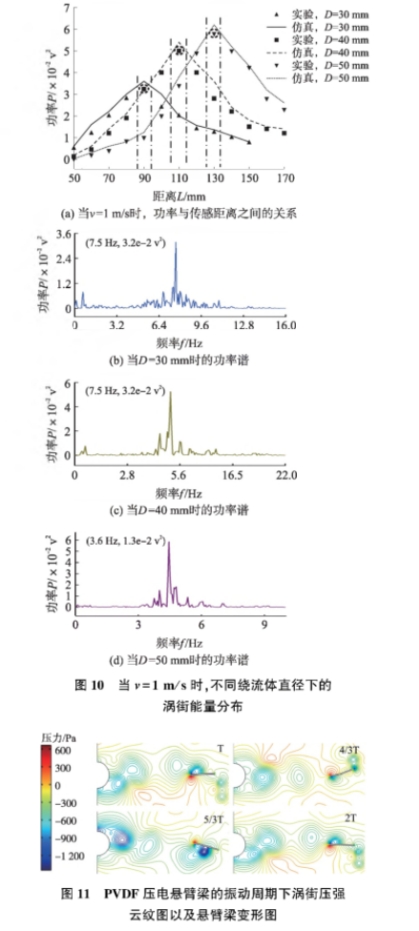
圖11展示(shì)了當(dāng)r=0.5m/s,d=30mm時,--個振(zhèn)動周期(qī)下渦街壓強雲(yún)紋圖(tú)以及(jí)懸臂梁的變形(xíng)情況(kuàng)。可以(yǐ)直(zhí)接看出(chū),懸臂梁(liáng)在渦街(jiē)中受到(dào)周期下的漩渦(wō)激振力而産生(shēng)振蕩現(xiàn)象。其中懸(xuán)臂梁(liáng)兩側的壓強差(chà)是導緻懸臂梁(liáng)的偏轉的直接原因,而壓(yā)強差(chà)是由(yóu)于渦街通(tōng)過懸臂梁産生的。與此同時(shí),壓(yā)強差産生(shēng)了流(liú)場的升力(lì).使得(dé)懸臂梁得到了向上及(jí)向下運(yùn)動的加速度。不僅如此,懸臂梁自由端(duān)振(zhèn)幅随(suí)時間(jiān)的增長最快(kuài),達到最(zuì)大振(zhèn)幅時(shí),振動速(sù)度(dù)最小。此外(wài),一個振動(dòng)周期内,懸(xuán)臂梁(liáng)産生了兩(liǎng)次振動方向的(de)改變,使得(dé)懸臂(bì)梁周圍(wéi)流(liú)場也(yě)發生了(le)周期性的改變(biàn),pvdf樂(lè)電懸(xuán)臂梁與流場的(de)相互(hù)作用形(xíng)成(chéng)了較爲穩(wěn)定的(de)振動規律,振動(dòng)周期(qī)保持不變(biàn)。
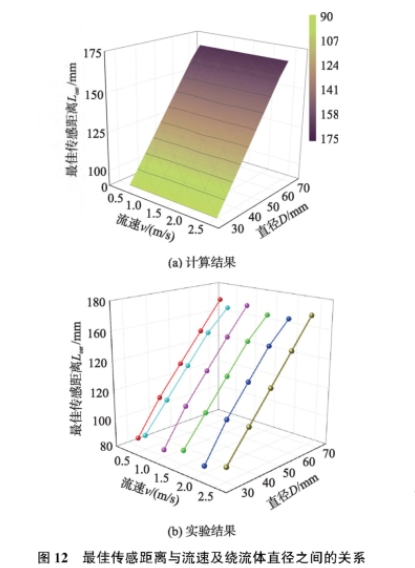
圖12爲傳感距離(lí)與流速及(jí)繞(rào)流體直(zhí)徑之(zhī)間的(de)計算(suàn)及(jí)實驗關系。由(yóu)圖(tú)12(a)可知随(suí)d值增大(dà)逐漸增(zēng)加,且近似線(xiàn)性關系。同時,測量(liàng)曲線與計算曲(qǔ)線--緻(zhì)。分析原因(yīn),根據圖(tú)4及(jí)式(10),最(zuì)住傳感距離應該在(zài)旋渦(wō)的成(chéng)熟區,d增大(dà)時,其兩側(cè)剪切層之(zhī)間距離變大,其(qí)相互作用變(biàn)慢,使漩渦(wō)的(de)脫落(luò)頻率減(jiǎn)小(xiǎo),使得(dé)旋渦産(chǎn)生(shēng)位置(zhì)距(jù)繞(rào)流體越遠(yuǎn),即最住(zhù)檢測位(wèi)置越(yuè)遠離圓柱(zhù)繞流體。由(yóu)圖12(a)進一-步可知,與ʋ無(wú)關(guān),這與圖8(a)的分(fèn)布曲線(xiàn)一(yī)緻。
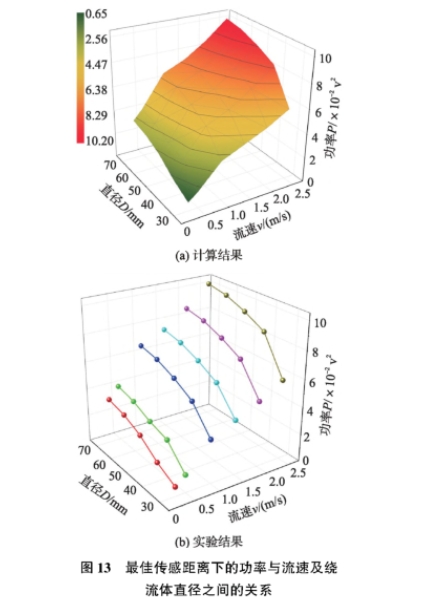
圖(tú)13爲傳感(gǎn)距(jù)離下的p值(p..)與o,d之間的(de)計算及實驗關(guān)系。由(yóu)圖(tú)13(a)可(kě)知,p.随(suí)。增大(dà)而(ér)遞增,同時随d增大(dà)而遞(dì)增;同時(shí),測(cè)量曲(qǔ)線與(yǔ)計算曲線(xiàn)保持-緻。分析原(yuán)内.根據式(9),由re與(yǔ)txd成正比關(guān)系,re增加,導緻其(qí)升力(lì)系數(shù)增大,即反映流場波動越(yuè)劇烈(liè),此(cǐ)時結構(gòu)表面(miàn)所受壓力增加,導緻(zhì)pvdf壓電(diàn)梁的(de)振蕩(dàng)幅值(zhí)變(biàn)大,産生的壓電功率越高。其(qí)中圖13(b)顯示(shì),當v=2.5m/s,d=70mm.,p..約爲10x10*mw;當0=0.5m/s,d=30mm,p.約爲8x102mw。可推(tuī)測,若(ruò)流速(sù)和直(zhí)徑同(tóng)時分别小(xiǎo)于0.5m/s和30mm,産(chǎn)生的p..,将(jiāng)小于(yú)8x10*mw。然而如果(guǒ)用時(shí)域電壓的(de)ua-u。值、0-u2值或u的方法(fǎ)來表(biǎo)征(zhēng)壓電梁感知(zhī)渦街的特(tè)性往往會被噪(zào)聲幹(gàn)擾(rǎo),難以提(tí)取特(tè)征量(liàng)。這也(yě)進一步證明了(le)木文采用提取(qǔ)功率來表征渦(wō)街在傳感距離(lí)上傳感強度的合理性。
4結論
設計和研究了(le)一(yī)種基于渦(wō)激振(zhèn)動的壓(yā)電傳感(gǎn)裝置。通(tōng)過(guò)響應(yīng)信(xìn)号分析了傳(chuán)感距離和功率(lǜ)與繞(rào)流體(tǐ)直徑和流速的變化(huà)規律(lǜ)。建立了流-固-電耦合(hé)數值(zhí)模型(xíng),構建了流(liú)速測量的(de)新方(fāng)法。采用通過提(tí)取頻(pín)域曲線中(zhōng)渦激頻率下的(de)功率作爲渦街的傳感強度。實驗和仿(páng)真結果(guǒ)表明(míng):增大繞流(liú)體直徑(jìng)可以使(shǐ)傳感(gǎn)距離和功(gōng)率線(xiàn)性增加;然(rán)而,在(zài)傳感距離(lí)不變(biàn)的情況下,增(zēng)大流速(sù)可以(yǐ)提高功率。通(tōng)過(guò)流場分析得出(chū)了采(cǎi)集信(xìn)号在(zài)lm下最優的木質(zhì)原内爲:在該處(chù),渦街(jiē)成(chéng)熟且脫(tuō)落穩定,升(shēng)力系(xì)數穩定(dìng)。此外,風洞實驗驗證該(gāi)基于(yú)渦(wō)激振動(dòng)的柔性壓電懸臂梁(liáng)流速感知(zhī)特性。結果表明(míng):該傳感器件能(néng)有(yǒu)效地測(cè)量低(dī)至0.3m/s流速;當ʋ=2.5m/s,d=70mm,p...約爲(wèi)10x10*mw;當ʋ=0.5m/s,d=30mm,p.約爲(wèi)8x102mw。該提取渦街信(xìn)号(hào)的方(fāng)法和規律可以解決(jué)傳統的渦(wō)街信号微(wēi)弱(ruò)以(yǐ)及低(dī)流速難測(cè):量的問題(tí),擴大了該類流速傳(chuán)感(gǎn)器的應用範(fàn)圍,快(kuài)響應的(de)流(liú)速傳感器(qì)件的(de)設計(jì)及測(cè)量提(tí)供了新的探測方(fāng)法(fǎ)。
本文來源(yuán)于網絡,如(rú)有侵(qīn)權聯(lián)系即删除!