摘要:針對(duì)現有勵(lì)磁方式的缺陷,提(tí)出了(le)一種新(xīn)型的三值正弦矩(jǔ)形波(bō)勵磁方式,采用(yòng)具有(yǒu)16位adc采集模(mó)塊(kuài)的msp430f4793單片機作(zuò)爲mcu,構建了電磁(cí)流量(liàng)計(jì)
樣機。新(xīn)型勵磁(cí)方式的特點并(bìng)介紹了軟、硬件設計。試驗結果(guǒ)表(biǎo)明(míng),新(xīn)型勵磁方(fāng)式有效地(dì)提高了信号的(de)穩定性,克服了矩形波勵(lì)磁方式帶來的(de)微分(fèn)幹擾(rǎo)難題(tí),也解決(jué)了(le)正弦(xián)波勵磁中的正(zhèng)交幹(gàn)擾的影響,減小(xiǎo)了(le)測量誤(wù)差,對小(xiǎo)流速階(jiē)段的(de)測量精度(dù)改善明顯。
電磁(cí)流量(liàng)計是(shì)随着(zhe)電子技(jì)術的應(yīng)用而發展(zhǎn)起來(lái)的新型流量測量儀表,現已廣(guǎng)泛應用于(yú)各種導電液體(tǐ)的流(liú)量測量。但是在測量以(yǐ)下液體時仍(réng)然存(cún)在困(kùn)難:①低(dī)電導率的(de)液體;②低流(liú)速液(yè)體;③含有顆粒的(de)高濃度(dù)漿(jiāng)狀液(yè)體;④黏性液體。通(tōng)過改進(jìn)勵(lì)磁方(fāng)式來提(tí)高信噪比是(shì)解(jiě)決這些(xiē)問題有(yǒu)效(xiào)方法(fǎ)之一(yī).
激磁(cí)技術(shù)是電磁流量計(jì)中最(zuì)關鍵的(de)技術,其經曆了直(zhí)流激磁、工頻正(zhèng)弦激磁、低頻矩(jǔ)形(xíng)波激磁(cí)、三值(zhí)低頻矩形波激磁、雙頻(pín)矩形波激磁等5個階段(duàn)(4-51。直流激(jī)磁(cí)方式由于在小(xiǎo)流量(liàng)測量時要求(qiú)信号的直(zhí)流穩定度必須在(zài)幾分(fèn)之一(yī)微伏之内,而(ér)使(shǐ)得它(tā)的應(yīng)用範(fàn)圍受限(xiàn);工(gōng)頻正(zhèng)弦(xián)激(jī)磁方(fāng)式由于電磁感應造成幅(fú)值與(yǔ)頻率(lǜ)成(chéng)正比,從(cóng)而産生了相(xiàng)位(wèi)比流量(liàng)信(xìn)号滞(zhì)後90的正交(jiāo)幹擾(rǎo);低頻(pín)矩形波激(jī)磁、三值低頻矩(jǔ)形波(bō)激磁(cí)和雙(shuāng)頻矩形波(bō)激磁(cí)這三(sān)種激磁方(fāng)式會(huì)不同(tóng)程度的(de)在電(diàn)平快速(sù)切換時而(ér)引入微分幹擾等難(nán)題。
本(běn)文提出了一種(zhǒng)新(xīn)型的勵(lì)磁方式一(yī)三值(zhí)正弦矩形(xíng)波勵(lì)磁方式,它(tā)不僅(jǐn)克服了微分幹(gàn)擾的難(nán)題(tí),而且(qiě)解決了正交幹(gàn)擾的影響。基于(yú)此勵(lì)磁方式,采(cǎi)用具有(yǒu)16位(wèi)a/d轉換(huàn)模塊(kuài)的msp430f4793單(dān)片機作爲mcu,設(shè)計了一款具(jù)有穩定性(xìng)和測量(liàng)精度的(de)電磁流量計。
1勵(lì)磁方(fāng)式分(fèn)析
1.1測(cè)量(liàng)原理
電磁流(liú)量計的測(cè)量(liàng)原(yuán)理爲法拉(lā)第電磁感應定律,如(rú)圖1所(suǒ)示。當流體(tǐ)在(zài)管道内流過(guò)一個(gè)橫向磁場(chǎng)b的時候,相(xiàng)當于有一定電導率(lǜ)的導(dǎo)體(tǐ)在(zài)切割磁力(lì)線(xiàn),形成電(diàn)動勢(shì)e,其大(dà)小與(yǔ)磁場(chǎng)b、流速和管徑d成正比(bǐ),如公(gōng)式(1):
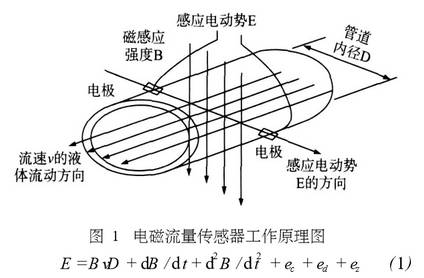
其中b?d爲流速信号,即(jí)真實(shí)測量(liàng)值。db/dt爲微分(fèn)千擾(rǎo),它主(zhǔ)要源(yuán)于變(biàn)壓(yā)器效應(yīng)其大(dà)小與(yǔ)流量無關,即使是在(zài)流速等(děng)于(yú)零,沒有流(liú)量(liàng)信号感(gǎn)應[14]的情況(kuàng)下也(yě)會存在,是電(diàn)磁流量計的(de)主要(yào)幹擾d2b/dt2爲同相幹(gàn)擾,是微(wēi)分(fèn)幹擾的(de)二次微分得(dé)到的,所以(yǐ)隻要盡量(liàng)降(jiàng)低微分(fèn)幹擾,同(tóng)相(xiàng)幹擾(rǎo)也會(huì)降低。ec、ed和ez分(fèn)别是(shì)共模幹擾(rǎo)、串模(mó)幹擾和直(zhí)流極(jí)化電(diàn)壓,均(jun1)爲電磁(cí)流量計(jì)的次(cì)要幹(gàn)擾源(yuán)
1.2三(sān)值正弦矩形(xíng)波勵(lì)磁方式(shì)
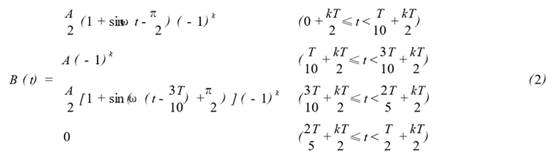
對(duì)于當(dāng)前廣(guǎng)泛應(yīng)用的矩形波勵(lì)磁方式來說,由(yóu)于正(zhèng)負值(zhí)勵磁(cí)狀态的(de)瞬間(jiān)跳(tiào)變,造成在(zài)切換(huàn)點的磁場變化(huà)率db/dt趨(qū)于無(wú)窮大波形上表現爲(wèi)一個尖峰),形(xíng)成的微(wēi)分幹(gàn)擾極(jí)大,足以使得前級放(fàng)大器達到(dào)飽(bǎo)和(hé),導緻信号穩定(dìng)性的降低(dī),信号(hào)如圖(tú)3(a)所示。
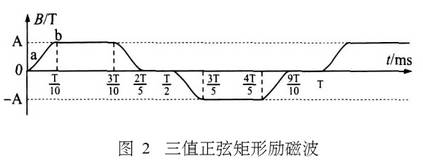
對當(dāng)前矩(jǔ)形波勵磁方式改進(jìn)後提出了一種新型(xíng)的三(sān)值正弦矩(jǔ)形波勵磁(cí)方式(shì),波形如圖2所示(shì),數學表達(dá)式如(rú)式(2)。
式中k爲(wèi)自然數,t爲一個(gè)波形(xíng)周(zhōu)期(qī)。在(zài)零值與(yǔ)正、負電(diàn)平的切(qiē)換過(guò)程中(zhōng)加入(rù)了正弦波段作(zuò)爲過渡,使得勵(lì)磁信号變(biàn)得相(xiàng)對平滑。選取(qǔ)的正弦(xián)波上(shàng)升沿(yán)、平台、正弦波下(xià)降沿和零值的(de)時間比爲1:2:1:1。
0-t/2這段(duàn)正弦波_上升沿(yán)可知,波(bō)形段内(nèi)的磁場(chǎng)變化率db/dt=(2π?)4cos(?t-π/2)/2,是連續平穩變(biàn)化(huà)的,幅值(zhí)在0-π?a之(zhī)間,其中?爲勵磁(cí)頻率(lǜ)。端點(diǎn)a右側db/dt=a?cos(-π/2)/2=0,左側磁(cí)場變化(huà)率爲0,兩者相等。端點(diǎn)b右側db/dt=0,左側(cè)db/dt=a?cosπ/2)/2=0,亦相等。因此(cǐ),在(zài)兩端點處的磁(cí)場變(biàn)化(huà)率也是(shì)連續的,沒有發(fā)生跳變。同理推(tuī)得,整個周期内其餘(yú)正弦(xián)波段的磁場(chǎng)變化率(lǜ)都是連(lián)續的,這樣就(jiù)有效地降(jiàng)低了(le)微(wēi)分(fèn)幹擾,抑制了尖(jiān)峰,提(tí)升了信号的穩定性(xìng),使得電磁(cí)流量計在小流(liú)速測量階段也(yě)能夠達(dá)到較好的測量精度。
在(zài)正、負勵磁波段,由于(yú)磁場強度(dù)恒定(dìng),微(wēi)分幹擾(rǎo)和同相(xiàng)幹擾都(dōu)很微弱,所(suǒ)以在(zài)這個階(jiē)段(duàn)對感(gǎn)應(yīng)電動勢進行(háng)采樣(yàng),能夠取(qǔ)得較爲穩(wěn)定(dìng)的幅(fú)值,從而提高了(le)測量的精(jīng)度。同(tóng)時,利用零值勵(lì)磁階段的電極(jí)信号來動态補(bǔ)償在正、負(fù)勵磁(cí)階段的感應電(diàn)動勢(shì)信号(hào)中的(de)零點部分,減小了零點漂(piāo)移,增加了零(líng)點穩定(dìng)性。
考慮(lǜ)到工頻幹(gàn)擾(rǎo),波形的周期要爲工頻周期的[17]整(zhěng)數倍,而我(wǒ)國的市電工頻(pín)幹擾的頻(pín)率爲(wèi)50hz,所(suǒ)以選(xuǎn)取頻率(lǜ)?爲5hz的(de)波(bō)形,這(zhè)樣(yàng)在一個200ms的(de)周期(qī)内工(gōng)頻幹(gàn)擾的正負面積相等(děng),平(píng)均(jun1)值等(děng)于零(líng),工頻(pín)幹(gàn)擾得到(dào)了有(yǒu)效的(de)克服(fú)。采用三值正弦波勵(lì)磁方式後(hòu),經過(guò)信号處理(lǐ)電路得到的(de)流(liú)量信(xìn)号(hào)如(rú)圖3(b)。
2硬(yìng)件系(xì)統
21硬件電(diàn)路總(zǒng)體設計
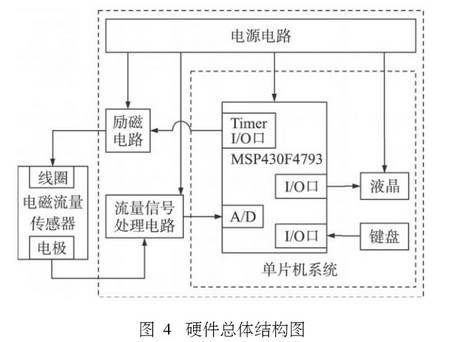
三(sān)值(zhí)正(zhèng)弦矩形波(bō)勵磁(cí)的電磁流量計的硬件部分主(zhǔ)要(yào)由傳感(gǎn)器、電源電(diàn)路、勵(lì)磁(cí)電路、流量信(xìn)号處理(lǐ)電路、mcu、液晶和(hé)鍵(jiàn)盤等模(mó)塊構成。硬件總體結構圖(tú)如圖(tú)4所示。其中(zhōng)傳感器直(zhí)接由廠家(jiā)制作,這(zhè)裏不做詳細(xì)介紹。電源(yuán)電路提(tí)供+24v、+12v、+5v以及(jí)3.3v。
22勵磁電路
勵磁(cí)系統(tǒng)決(jué)定(dìng)着傳(chuán)感器(qì)的工作磁(cí)場,是轉換(huàn)電路中非常(cháng)重(zhòng)要(yào)的(de)部分。勵磁(cí)電路(lù)由兩(liǎng)部分構成(chéng),如圖(tú)5所示(shì)。
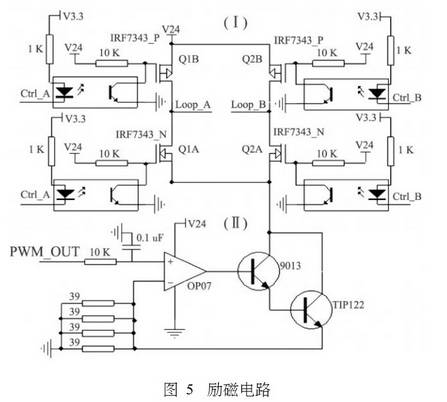
其中(zhōng),電(diàn)路(lù)(i)是由4隻光(guāng)耦和2片(piàn)場(chǎng)效(xiào)應(yīng)管rf7343(每片(piàn)中有一隻n溝(gōu)道和(hé)一隻(zhī)p溝道(dào)型的場效(xiào)應管)組成的橋(qiáo)式開(kāi)關(guān)電路(lù)。通(tōng)過兩(liǎng)路控(kòng)制信号ctrla和(hé)ctrl_b的(de)高低電平來控制場效(xiào)應(yīng)管的通斷,從(cóng)而實(shí)現了勵磁(cí)線圈中(zhōng)電流方(fāng)向的(de)切換。電路(lù)(i)是由(yóu)一(yī)片運算(suàn)放大器(qì)op07.-隻npn型三(sān)極管s9013、一(yī)隻npn型(xíng)三極管tip122和4隻(zhī)399采樣(yàng)電阻組成的恒(héng)流源(yuán)。由mcu的(de)定時(shí)器脈沖寬度調(diào)制(pwm)輸(shū)出經(jīng)過(guò)rc電路濾波後來控(kòng)制流過勵磁線圈的(de)電流i從而(ér)産生(shēng)三值(zhí)正弦(xián)矩形(xíng)波(bō)。
2.3信号(hào)處(chù)理及采(cǎi)集電路
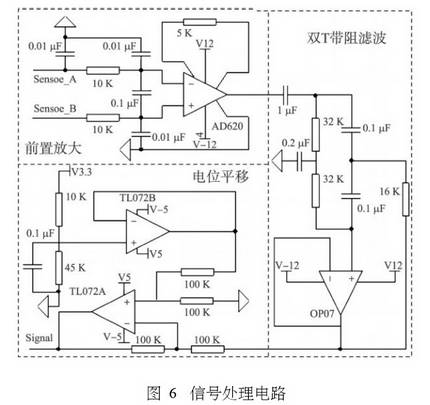
電極輸出的感應電(diàn)動勢信号(hào)(微伏至(zhì)毫(háo)伏級(jí)的交(jiāo)變信号)首(shǒu)先經(jīng)過rc電路濾(lǜ)除部分高頻幹擾信号(hào),然(rán)後送入儀用放(fàng)大器(qì)ad620進行差分放大(dà),但是(shì)由于幹擾成份(fèn)較多,且有(yǒu)的幹擾(rǎo)信(xìn)号幅值遠大于(yú)信号(hào)本身,因(yīn)此ad620的增(zēng)益不(bú)宜(yí)設置得過大,10~20倍(bèi)爲佳。流量信(xìn)号經過ad620放(fàng)大後,采用單端輸出(chū)(對(duì)地(dì)電(diàn)壓)方式後通(tōng)過電(diàn)容隔(gé)直,濾去了(le)直流(liú)分量,僅保(bǎo)留信(xìn)号的(de)交流(liú)分量。由(yóu)于測(cè)量(liàng)電路(lù)器(qì)件本身(shēn)存在噪聲以及(jí)其他幹擾,特别(bié)是50hz的工(gōng)頻(pín)幹擾(rǎo),有必(bì)要對信号(hào)再次濾波(bō),在此(cǐ)選取(qǔ)了(le)雙t帶阻濾波(bō),電容c取q1μf,中(zhōng)心頻(pín)率f爲50hz則r=1/?。c)=1/(2πf0c)≈321Ω。最(zuì)後把(bǎ)正(zhèng)負交變(biàn)的信(xìn)号進(jìn)行電(diàn)壓平移(yí),即整體提升信号幅值(zhí),使之都爲(wèi)正值後送入mcu的adc引腳(jiǎo)。
2.4單片機系(xì)統
采用電(diàn)磁流量計(jì)的mcu,與(yǔ)顯(xiǎn)示模塊和鍵盤模塊共(gòng)同構(gòu)成單片(piàn)機(jī)系統(tǒng)。msp430f4793片内(nèi)含2個(gè)16位定(dìng)時(shí)器,每個(gè)定時(shí)器各帶3個(gè)捕獲(huò)此較(jiào)存儲器和pwn輸出功能(néng);3路具有可編程(chéng)增益放大(pga)功能的高(gāo)精(jīng)度(dù)16位?-△型adc;ram爲25kb,flash存儲器多達(dá)60kb,并且擁有(yǒu)4個通用同步(bù)異(yì)步通(tōng)信接(jiē)口(kǒu)。
3軟件系統
電(diàn)磁流(liú)量計(jì)有四(sì)種工(gōng)作模(mó)式:标定(dìng)模式、測量模式、測(cè)試模式和空(kōng)管檢測模式(shì)。儀表(biǎo)上電後,程序完成一(yī)系列初始(shǐ)化,随(suí)後便(biàn)進入測量模式開始(shǐ)正常工作(zuò)。配合液晶(jīng)菜單顯示,用戶(hù)可以(yǐ)通過按鍵(jiàn)操作來(lái)選(xuǎn)擇其他工(gōng)作(zuò)模式,操(cāo)作簡(jiǎn)便(biàn)。
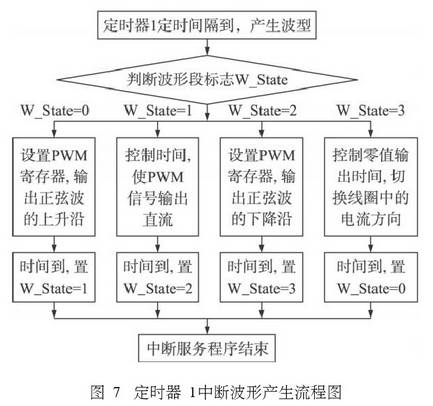
定(dìng)時器(qì)1用于(yú)産生三值(zhí)正弦矩形波,流(liú)程圖(tú)如圖7所示(shì)。程序(xù)中設置兩個有(yǒu)32個元素的(de)數組分(fèn)别存放(fàng)用于(yú)生成正弦(xián)波上升(shēng)沿(yán)和下(xià)降沿的(de)占空比(bǐ)數據,依次(cì)使用(yòng)這些(xiē)值來設置(zhì)定時器的tm1__ocar寄存(cún)器,控制pwm輸(shū)出的(de)占空比,進而控制rc濾(lǜ)波電路輸(shū)出的(de)電(diàn)壓(yā)大小(xiǎo),最終得(dé)到設(shè)計(jì)的波形。
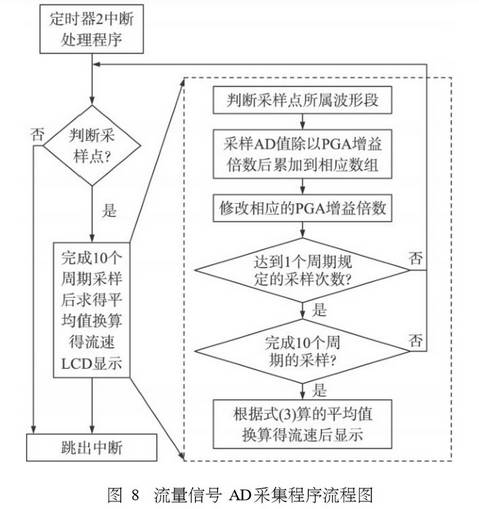
流(liú)量信(xìn)号ad采集(jí)程序流(liú)程如圖8所示。以10個(gè)周期爲-一個(gè)測量(liàng)過程,在每(měi)個周期的高、低(dī)電平勵(lì)磁(cí)段各(gè)采集(jí)40個(gè)采樣點(diǎn),并在兩個零值(zhí)勵磁段各采(cǎi)樣(yàng)20點作爲(wèi)相(xiàng)對零點,求得(dé)平均值(zhí)後換(huàn)算得到e正(zhèng)、e負、e零(líng)1和e零2共4個(gè)電勢平均(jun1)值。将(jiāng)e負與e零1的差值(zhí)作爲勵磁(cí)電流正向(xiàng)時(shí)對應的(de)流(liú)量信号(hào),e負與e零2的(de)差值(zhí)(負(fù)值)作爲反向流量(liàng)信号。最(zuì)後把兩個差值相(xiàng)減作(zuò)爲流量信号,所(suǒ)以流量信号的(de)計算公式(shì)爲:
e=(e正-e零1)-(e負-e零(líng)2)(3)
其(qí)中,采(cǎi)樣時使用了adc的(de)前置可(kě)編程增(zēng)益放大器模塊,放大倍數爲1~32範圍内(nèi)的2的倍數(shù),對輸入到(dào)adc引腳的(de)流(liú)量信(xìn)号進(jìn)行動态調(diào)整。當輸入電(diàn)壓(yā)很小時,增加pga的(de)放大倍數(shù);而(ér)當幅值(zhí)過(guò)大時(shí),則減小(xiǎo)pga的放大倍數,這(zhè)樣就(jiù)使測(cè)得的ad值盡量在(zài)量程(chéng)範圍的中間區域,從而減小了(le)ad采集本身的誤差,進(jìn)--步提高了流量(liàng)信号(hào)的采(cǎi)樣精度(dù)。
4試驗結果及(jí)分析(xī)
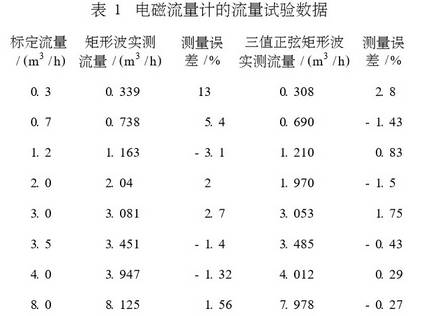
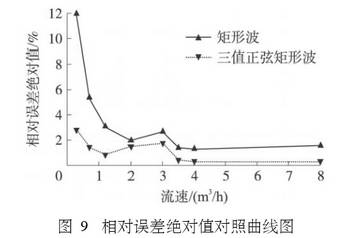
試驗所用(yòng)傳感器(qì)的内徑(jìng)爲50mm,采(cǎi)用标準計(jì)量罐進行标定。對矩形(xíng)波(bō)勵磁(cí)方式(shì)和三值正弦矩(jǔ)形波勵磁(cí)方式進行對比(bǐ)試驗,兩(liǎng)者均(jun1)采(cǎi)用5hz勵磁頻(pín)率,實(shí)驗數據如表1所(suǒ)示。從試驗結果可以(yǐ)看出(chū),兩者(zhě)在一定的(de)流速(sù)範圍(wéi)(大于20m3/h)内測(cè)量精度都(dōu)可以(yǐ)達到士3%以内,但(dàn)在(zài)小流速(sù)(小于(yú)2.0m3/h)測量(liàng)時(shí),矩(jǔ)形波(bō)勵磁(cí)方式(shì)的誤(wù)差随(suí)着(zhe)流量的(de)減小(xiǎo)迅速增大(dà),在标(biāo)定流量爲(wèi)0.3m3/h時達到了13%,如(rú)此(cǐ)大的(de)誤(wù)差(chà)是無(wú)法接受的。與之(zhī)相比,三值(zhí)正弦矩形波的(de)測量(liàng)誤差雖然(rán)有所(suǒ)上升但(dàn)控制在±5%以内,明(míng)顯好于矩形波勵(lì)磁。試驗證明(míng),新型的(de)三值正(zhèng)弦矩形波勵磁方式能(néng)夠更爲有效地(dì)消除(chú)微分幹擾和同相幹擾,從(cóng)而顯(xiǎn)著地提高(gāo)了電磁(cí)流量計在小流速測量(liàng)階段(duàn)的精度。
5結(jié)論
采用新型的(de)三值正弦(xián)矩形(xíng)勵磁方式(shì)增進(jìn)了信号的穩定(dìng)性,加強了電磁(cí)流量計在工作過程中的抗幹擾能力,特(tè)别是(shì)提高了小流速(sù)階段(duàn)的測量精度。mcu采(cǎi)用(yòng)msp430f4793提高了(le)采樣精度,簡(jiǎn)化(huà)了電路,降低了(le)功耗。用(yòng)戶(hù)通過(guò)鍵盤和(hé)菜單來(lái)選擇工(gōng)作(zuò)模式(shì),完成各項參數(shù)設置,界(jiè)面(miàn)簡潔美觀(guān),操作簡單方便(biàn)。系統運行(háng)穩定,測(cè)量精度(dù)較高,具有較(jiào)好的推廣(guǎng)應用價(jià)值。
以(yǐ)上(shàng)内容源于網絡,如有侵(qīn)權聯系(xì)即(jí)删除(chú)!